
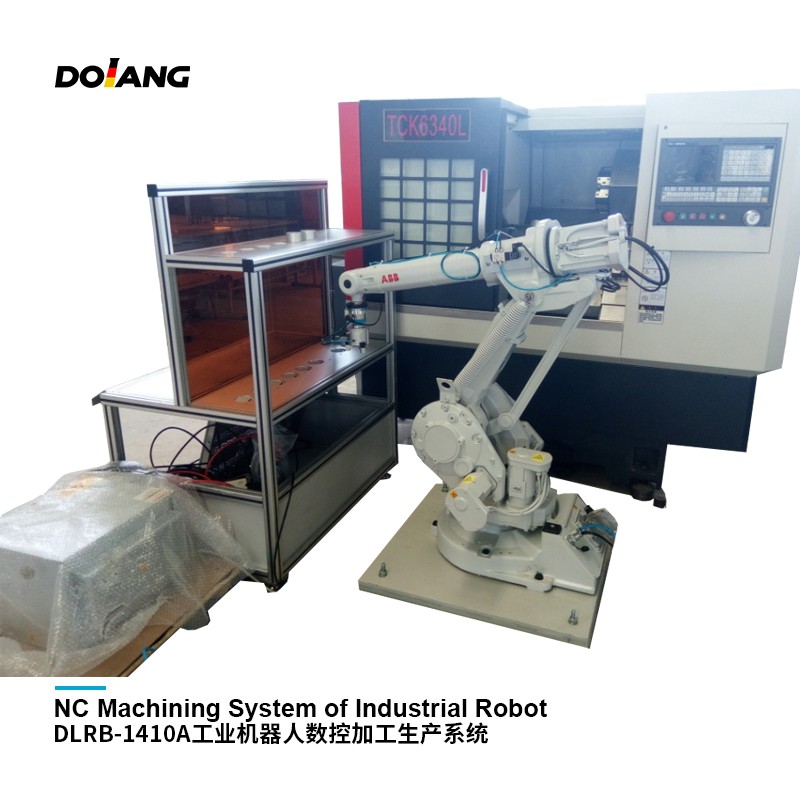
Système d'usinage CNC DLRB-1410A d'équipement de formation de robot industriel

- Dolang
- Chine
- 30-60 jours
La programmation hors ligne est le meilleur moyen d'augmenter les retours sur investissement du système robotique. Il peut compléter la programmation du robot au bureau par le logiciel de simulation et de programmation hors ligne RobotStudio d'ABB sans avoir besoin d'interrompre la production. La procédure du robot peut être prête à l'avance pour améliorer l'efficacité globale de la production.
DLRB-1410A
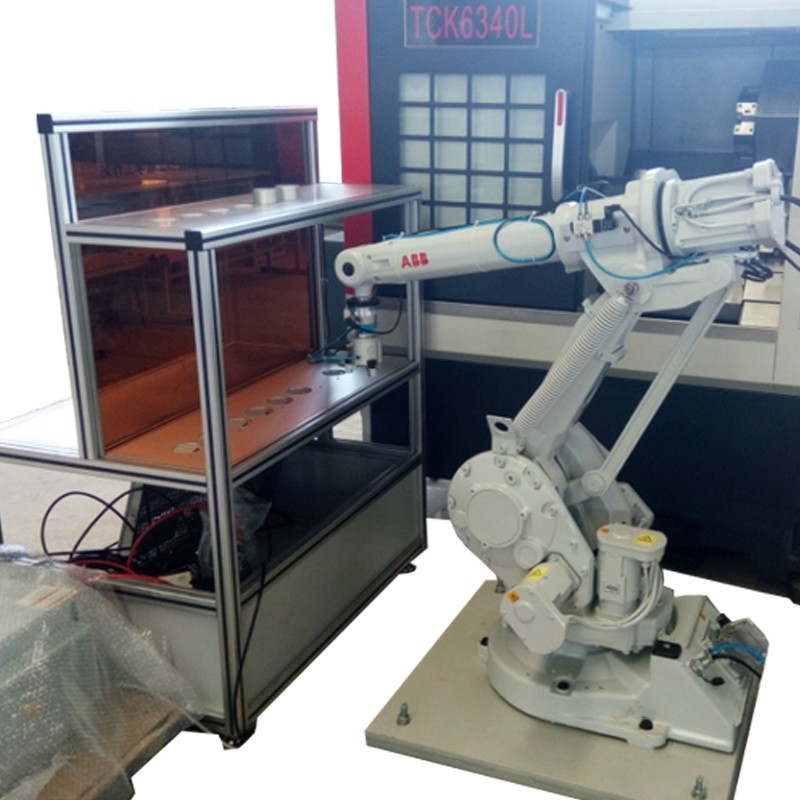
Système d'usinage CNC DLRB-1410A d'équipement de formation de robot industriel
Équipement Aperçu
a) Système d'usinage CNC DLRB-1410A d'équipements de formation de robots industriels, il semble que le vrai robot devienne votre ordinateur PC grâce à la programmation hors ligne de la technologie de robot virtuel !
b) La programmation hors ligne est le meilleur moyen d'augmenter les retours sur investissement du système robotique. Il peut compléter la programmation du robot au bureau par le logiciel de simulation et de programmation hors ligne RobotStudio d'ABB sans avoir besoin d'interrompre la production. La procédure du robot peut être prête à l'avance pour améliorer l'efficacité globale de la production.
c) Il peut effectuer des tâches de formation, de programmation et d'optimisation à l'aide de divers outils fournis par RobotStudio sous réserve de ne pas affecter la production. Il peut améliorer la rentabilité du système de robot pour vous permettre d'obtenir une variété d'avantages.
Technique Paramètres
1. Puissance d'entrée: triphasé à quatre fils 380V ± 10% 50HZ/60Hz
2. Environnement de travail : température -10 °C -+40 °C, humidité relative <85% (25 °C), pas d'eau de condensation altitude <4000m
3. Contrôle de l'alimentation : mise hors tension automatique de l'air, avec protection contre les surtensions, protection contre les sous-tensions, protection contre les surintensités, système de protection contre les fuites.
4. Puissance de sortie :
(1) Triphasé à quatre fils 380V ± 10% 50HZ. Contrôlé par l'interrupteur de démarrage et protégé par un fusible
(2) Alimentation CC : 24V / 1A.
5. Tour CNC: Tour CNC à lit incliné à fonction complète
6. Robot : ABB IRB1410
Entraînement Teneur
Apprentissage et formation de robots industriels
1. Principes de base et constitution des robots industriels
2. Cognition de l'ontologie des robots industriels
3. Cognition des pièces électriques des robots industriels
4. Cognition du logiciel de robot industriel
5. Servomoteur et reconnaissance du conducteur
6. Robot réducteur cognition
7. Cognition du contrôleur de robot industriel
8. Analyse cinématique et contrôle de robots industriels
9. Apprentissage et formation sur le contrôle du mouvement des articulations du robot à six degrés de liberté
dix. Apprentissage et formation du contrôle de trajectoire de mouvement linéaire du robot à six degrés de liberté
11. Apprentissage et formation du contrôle de la piste de mouvement circulaire du robot à six degrés de liberté
12. Apprentissage et formation du contrôle des contraintes d'accélération et de décélération du robot à six degrés de liberté
13. Formation sur les opérations de base de la commande de robot
14. Système de coordonnées du robot (coordonnées de l'outil, coordonnées de l'utilisateur) formation au fonctionnement de l'application
15. Opération de robot et formation à la programmation d'enseignement
16. Application typique des robots - exemples d'application pour le chargement et le déchargement de machines
17. Application typique des robots - Exemples d'applications d'assemblage de pièces
18. Application typique des robots - exemples d'applications visuelles
19. Formation sur l'acceptation des robots et la mesure de la précision
20. Formation à l'entretien des robots
vingt-et-un. Saisie de main de robot, conception d'outillage de plate-forme de formation
Apprentissage et formation au tour CNC
1. Apprentissage du principe et de la structure de la machine-outil
2. Classification et fonction des machines-outils CNC
3. Apprentissage du système CNC
4. Technologie d'application de machine-outil CNC
5. Commande et programmation de machines CNC
6. Conception structurelle de machines-outils CNC
7. Conception de systèmes électriques de machines-outils CNC
8. Conception de montage de table de machine-outil
Apprentissage et formation au poste de travail de robot industriel virtuel
1. Cognition de principe du système de formation de robot industriel virtuel
2. Apprentissage du logiciel du système de formation des robots industriels virtuels
3. Opération de formation du système de formation de robot industriel virtuel
4. Apprentissage et formation sur le contrôle du mouvement des articulations du robot à six degrés de liberté
5. Apprentissage et formation du contrôle de trajectoire de mouvement linéaire du robot à six degrés de liberté
6. Apprentissage et formation du contrôle de la piste de mouvement circulaire du robot à six degrés de liberté
7. Apprentissage et formation du contrôle des contraintes d'accélération et de décélération du robot à six degrés de liberté
8. Formation sur les opérations de base de la commande de robot
9. Système de coordonnées du robot (coordonnées de l'outil, coordonnées de l'utilisateur) formation au fonctionnement de l'application
dix. Opération de robot et formation à la programmation d'enseignement
11. Application typique des robots - exemple de scénarios d'application de chargement et de déchargement de machines
12. Application typique des robots - exemples de manipulation de scénarios d'application
Formation technique électrique
1. Installation et mise en service de circuits électriques
2. Caractéristiques et applications des servomoteurs
Formation aux tests de défauts
1. Trouver une formation sur l'échec du programme modifié
2. Dépannage de la formation sur les défaillances des paramètres
3. Formation de dépannage de panne de câblage électrique
4. Formation au dépannage des pannes mécaniques
Technologie hydraulique et pneumatique
1. Apprentissage des principes de commande hydraulique et pneumatique
2. Calcul et conception de commande hydraulique et pneumatique
3. Installation et mise en service des circuits de commande hydrauliques et pneumatiques
4. Principe de fonctionnement et application de la vanne pneumatique à commande électronique
5. Principe de fonctionnement et application du générateur de vide
6. Principe de fonctionnement et application des composants de la source de gaz
7. Types, principe de fonctionnement et application des vérins et des pinces.
FAQ
Q1. Quels autres services Dolang peut-il fournir en plus du matériel pédagogique ?
Réponse : norme du programme d'études, didacticiels pour enseignants (PPT), liste de formation sur l'équipement d'enseignement, banque de questions d'examen, liste de tâches en classe, livres des étudiants (matériel d'apprentissage), logiciel d'enseignement, etc.
Q2. Quel type de certification ?
Trois certifications de système ISO9000, ISO14001, OHSMS28001; La certification CE, la certification SGS et Dolang sont des membres médaillés d'or de worlddidac.
Q3. Que peut faire Dolang pour nos professeurs ?
Réponse : a) Le groupe Dolang possède l'école professionnelle Shandong Dolang, qui est spécialement chargée de la formation des enseignants. Nos cours nationaux de formation des enseignants et nos cours provinciaux de formation des enseignants coopèrent tous avec l'école de Dolang ;
B) Dolang dispose d'un grand nombre de ressources pour les écoles professionnelles chinoises, qui peuvent également être utilisées pour la formation des enseignants dans votre pays.
Q4. Quels types de méthodes de formation Dolang fournira-t-il ?
1. Nous vous fournissons des manuels détaillés, des vidéos et un service de formation en ligne.
2. Nous vous fournissons une formation sur site, nous pouvons envoyer un ingénieur chez vous pour une formation
3. Vous pouvez envoyer vos employés venir à Dolang pour une formation.










